热线:021-66110810,66110819
手机:13564362870
热线:021-66110810,66110819
手机:13564362870
近视的发生与发展的一个重要因素是长时间近距离用眼,导致眼部睫状肌持续紧张,进而引发眼轴拉长。现有近视控制产品所使用的技术有远像光屏技术、模拟自然光照技术和电子脉冲穴位技术等。
远像光屏技术通过调节图像的虚拟视距,可以让用户在近距离时看到虚拟的远距离图像,从而放松睫状肌,减轻眼部的调节负担。
模拟自然光照技术:研究表明自然光对近视防控有益处,已经在智能照明系统和护眼台灯中得到初步应用,如调节LED灯的色温和亮度。
电子脉冲穴位技术:通过对眼周特定穴位的刺激,达到缓解眼部疲劳和改善视力的效果。现代科技通过微电刺激和振动按摩等手段,实现了对电子脉冲穴位的模拟应用。电子脉冲穴位技术已应用在眼部按摩仪和保健设备中,如电子眼保健仪、眼部按摩仪等。这些设备通常通过微振动和电刺激对眼周穴位进行刺激,使用方便且无副作用。
以上现有技术需要多种设备进行实现,且难以做到同一时间段内共同应用,增加了使用者的使用时间,限制了近视控制效果的进一步提升。
发明内容
本申请的目的是提供一种用于近视防控的头戴式综合化智能系统,可减少用户防控使用时间,并提升近视控制效果。
为实现上述目的,本申请提供了如下方案:
本申请提供了一种用于近视防控的头戴式综合化智能系统,包括:头戴式支架、远像光屏成像模块、模拟自然光照模块、电子脉冲穴位模块、传感模块和控制模块。
远像光屏成像模块、模拟自然光照模块、电子脉冲穴位模块、传感模块和控制模块均固定在头戴式支架上;头戴式支架用于佩戴在用户头部,并在佩戴时使远像光屏成像模块对准用户的眼部,模拟自然光照模块和电子脉冲穴位模块位于用户眼周的对应位置上。
传感模块用于实时检测环境光线强度、用户的眼部位置、用户的头部姿势和电子脉冲穴位模块的微电极位置;所述控制模块用于根据实时检测的环境光线强度、用户的眼部位置和用户的头部姿势,调整远像光屏成像模块中形成的虚拟图像质量,使远像光屏成像模块生成清晰的虚拟图像;所述远像光屏成像模块用于将清晰的虚拟图像投射至用户的眼部;所述控制模块还用于控制模拟自然光照模块将模拟的自然光投射至用户的眼部;所述控制模块还用于根据实时检测的用户的眼部位置和/或电子脉冲穴位模块的微电极位置,调整电子脉冲穴位模块的微电极刺激位置,并通过电子脉冲穴位模块刺激用户的眼周穴位。
第二控制电路板
功能:接收控制系统的指令,控制电动驱动系统的运作,并处理来自位置传感器的数据。
组成:第二微处理器、信号放大器和第二接口模块。
位置关系:第二控制电路板安装在电子脉冲穴位模块2的内部,通过电缆与电动驱动系统和位置传感器连接。
位置传感器通过第二接口模块与信号放大器连接;第二微处理器分别与信号放大器和电驱动系统连接。信号放大器用于对位置传感器实时检测的用户的眼部位置和微电极位置进行信号放大后,均传输至第二微处理器。第二微处理器用于比较信号放大后的用户的眼部位置和微电极位置,若微电极位置与用户的眼部位置的偏差小于预设阈值,则控制电驱动系统调整微电极刺激位置;若微电极刺激位置与用户的眼部位置的偏差大于等于预设阈值,则控制电动驱动系统停止,发出警报或错误提示。
第二微处理器的具体处理过程和处理结果如下:
数据采集:
每个位置传感器(光学)持续采集数据,并将这些数据通过接口模块传输到控制电路板。
数据包括微电极的当前位置、用户眼部的具体位置及其相对位置关系。
数据预处理:
信号放大器对传感器信号进行放大和滤波,消除噪声和干扰。
微处理器接收预处理后的数据,将其转换成数字信号,便于进一步处理。
数据分析与位置计算:
微处理器运行定位算法,计算微电极和用户眼部的三维空间坐标。
建立实时的坐标系,确定微电极与目标穴位之间的距离和角度关系。
决策与控制信号生成:
根据预定的电子脉冲路径和位置精度要求,微处理器对比当前微电极位置与目标位置,计算需要的调整量。
根据具体情况生成不同的控制信号,这些信号包括微电极的进出运动指令、力度调整指令等。
反馈与安全监控:
实时监控系统状态,尤其是微电极位置和用户眼部位置的变化。
若检测到异常情况(如微电极偏离预定轨迹或用户眼部位置突变),微处理器立即生成报警信号或停机指令。
微电极位置偏离目标位置:
处理结果:微电极当前位置与目标穴位位置有偏差。
控制措施:调整电动驱动系统,控制微电机和驱动杆移动,使微电极回归到正确的轨迹上。具体操作包括驱动杆的伸缩和齿轮系统的旋转。
微电极达到目标位置:
处理结果:微电极已经到达目标穴位位置。
控制措施:保持微电极位置稳定,并根据预设程序逐步进行电子脉冲操作,如逐渐增加或减小力度,进行微小的进出运动以达到最佳刺激效果。
用户眼部位置变化:
处理结果:用户眼部位置发生了变化,可能导致微电极与目标穴位的相对位置不准确。
控制措施:立即调整微电极位置以重新对准目标穴位,确保电子脉冲操作的安全和有效性。如果变化过大,系统可能暂停操作并发出警报,提示用户重新定位。
异常情况检测:
处理结果:检测到异常情况,如微电极过度偏离、传感器数据异常等。
控制措施:立即停止电动驱动系统,微电极停止运动,发出警报或错误提示。系统进入安全模式,等待用户或技术人员介入处理。
力度调整需求:
处理结果:需要调整电子脉冲力度以达到最佳治疗效果。
控制措施:控制电动驱动系统调节微电极的进出深度和力度。通过微电机的精细控制,实现微电极的微小进出或震动,以提供适当的刺激。
(6)传感模块
基于以上内容,传感模块包括位置传感器和传感器系统。
功能:用于检测用户眼部位置、环境光线,提供实时反馈。
连接关系:与头戴式支架1模块连接,传感器通过数据线或无线方式与控制模块连接,将检测数据传输到控制模块。
1.位置传感器
功能:用于实时检测电子脉冲装置的位置及用户眼部的具体位置,确保电子脉冲精确。
组成:光学传感器或超声波传感器。
位置关系:位置传感器安装在微电极固定座的周围,能够覆盖整个电子脉冲范围。
光学传感器检测原理为光学传感器通过光的反射、折射或遮挡来检测物体的位置。具体过程如下:
光学传感器布置:
光学传感器安装在微电极固定座的周围,形成一个覆盖整个电子脉冲范围的检测网络。
传感器发射光束(如激光、红外光等)并接收反射光或通过光的遮挡来判断物体的位置。
眼部位置检测:
光学传感器发射光束,光束照射到用户眼部并反射回来,通过接收反射光的时间差、强度或角度变化,计算出用户眼部的位置。
传感器可能会进行多点扫描,形成一个三维模型,精确定位用户眼部的各个区域。
微电极位置检测:
类似地,光学传感器可以通过检测微电极位置的反射光来确定微电极的三维空间位置。
传感器会实时监控微电极的运动轨迹,确保其位置与眼部特定穴位的距离和角度符合预定的刺激要求。
数据处理与反馈:
收集到的位置数据通过信号传输传递给控制电路板。
微处理器处理这些数据,生成实时的位置信息,并调整微电极的运动轨迹和刺激力度。
2.传感器系统
传感器系统,如视觉传感器、红外传感器、头部姿态传感器等,实时监测用户的头部和眼部位置,确保电子脉冲装置的精确定位。
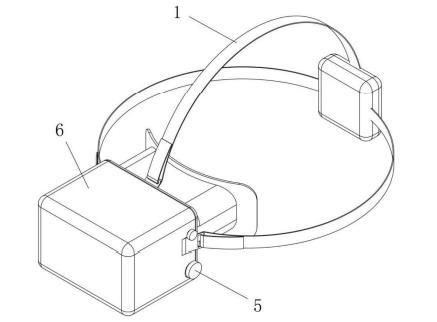
(7)镜头盖6
在一个示例中,本申请的用于近视防控的头戴式综合化智能系统还包括:镜头盖6。显示屏3与镜头盖6内壁固定在连接。在显示屏3的周围还设置有一圈LED灯带7,LED灯带7同样固定在镜头盖6的内壁上。镜头盖6能将调焦装置5罩在其内。镜头盖6上设置有插槽或卡扣,能够可拆卸地连接头戴式支架1。
(8)交互界面
在一个示例中,本申请的用于近视防控的头戴式综合化智能系统还包括:交互界面。交互界面与控制模块连接。交互界面用于接收用户输入的指令,并传输至控制模块。
交互界面的功能:提供用户与设备的交互界面,包括控制参数的输入和各模块状态的实时反馈。连接关系:通过数据线或无线方式与控制模块连接,用户通过界面输入指令,控制模块根据指令进行相应的调整。
综上,本申请的关键技术有:
1、远像光屏成像模块的设计与实现:包括光学透镜组4、图像处理器,以及如何实现图像远近视角的调整。
2、模拟自然光照模块的设计与实现:包括光源、光强度及色温调节机制,如何
根据本申请提供的具体实施例,本申请具有了以下技术效果:
本申请提供了一种用于近视防控的头戴式综合化智能系统,将远像光屏成像模块、模拟自然光照模块和电子脉冲穴位模块整合在同一装置中,在同一时间段内可同时使用远像光屏成像模块、模拟自然光照模块和电子脉冲穴位模块,减少了用户的使用时间;由于综合应用了多种近视防控手段,为用户能够提供全方位的视力保护,提升了近视控制效果。
 相关新闻
相关新闻